Optimization in Mechanical Engineering¶
Description¶
Using the optimization methods implemented in optymus: (a) determine the displacements \((u, v)\), of point A, that minimize the Total Potential Energy (\(\Pi\)) of the spring system indicated in the figure below. Adopt the following numerical values:
Initial points: \(x0 = \{15, 12\}^t\) e \(x0 = \{9, −2\}^t\);
\(L1 = 12 cm\);
\(L2 = 8\) cm;
\(EA1 = 12 N\) ;
\(EA2 = 80 N\) ;
\(\rho 1 = 0.82 N/cm\);
\(\rho 2 = 0.52 N/cm\);
We can see the system in the image below:
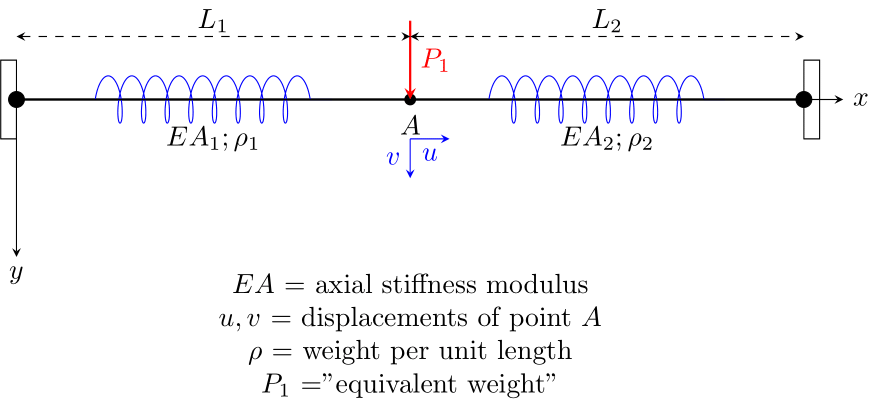
We can optimize the system by minimizing the total potential energy of the system, which is given by:
\[\Pi = \frac{1}{2} \left( EA1 \cdot \rho1 \cdot (L1 - \sqrt{u^2 + v^2})^2 + EA2 \cdot \rho2 \cdot (L2 - \sqrt{u^2 + v^2})^2 \right)\]
and numerically,
\[\Pi = 5(((x_1 - 8)^2 + x_2^2)^{1/2} - 8)^2 - 7x_2 + 0.5(((x_1 + 12)^2 + x_2^2)^{1/2} - 12)^2\]
Implementation¶
[1]:
from optymus import Optimizer
import jax.numpy as jnp
[2]:
def f(x):
return 5 * (((x[0] - 8)**2 + x[1]**2)**0.5 - 8)**2 - 7 * x[1] + 0.5 * (((x[0] + 12)**2 + x[1]**2)**0.5 - 12)**2
[3]:
initial_point = jnp.array([9.0, -2.0])
opt = Optimizer(f_obj=f, x0=initial_point, method='steepest_descent')
Steepest Descent 0: 34%|███▍ | 34/100 [00:02<00:04, 15.15it/s]
[4]:
opt.report()
[4]:
steepest_descent
Initial guess: [ 9. -2.]
Optimal solution: [2.78529691 6.89972057]
Objective function value: -36.880428392231394
Number of iterations: 34
Time elapsed: 2.5588
[6]:
opt.plot(lb=-25, ub=25, n_levels=150)